
昨日に続いて車の説明を続けます。
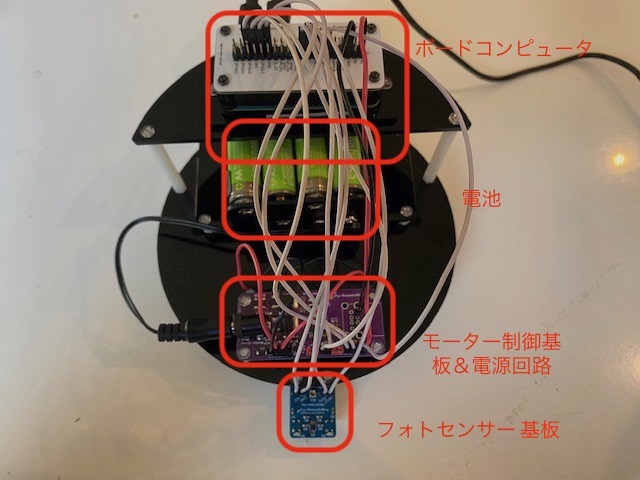
昨日はボードコンピュータの端子の話をしましたね。
結局この端子を見ながらそれぞれの基板に配線していますが、便利ですw
実は、このボードコンピュータですが、単体として動きます。HDMI端子があるのでディスプレイをそのまま繋ぐことができます。
USB端子もありますので、キーボード・マウスも問題なく使えます。
OSはWindowsでもMacOSでもなく、LINUXを載せています。Windowsライクな画面も出せます。
なぜ、このボードコンピュータを採用したかというと、これがあればノートPCなどを別に用意する必要がないからです。しかも小さいので、持ち運びも苦痛はありませんからね。
次に、電池です。
電池は、モーターを駆動するためのものです。ボードコンピュータの出力を直接モーターに繋ぐと許容される電流を超えるためモーターを駆動するための電源を別に用意する必要があるためです。
電池の下にあるのがモーター制御基板です。この基板にはボードコンピュータからの指令を受け取ってモータを駆動させるための制御をします。このボードには前出の電池を繋ぎます。
そうすると、この車を走らせるために、ボードコンピュータ用の電源とモーター駆動用の電源の2つを用意しなければなりません。それはちょっと嫌だなと思いました。
ですので、このモーター制御基板には電源回路を内蔵しました。電池を繋いで、モーターだけでなく、ボードコンピュータにも電源供給できたらコンパクトに纏まるのではないかと思って電源回路を追加しています。
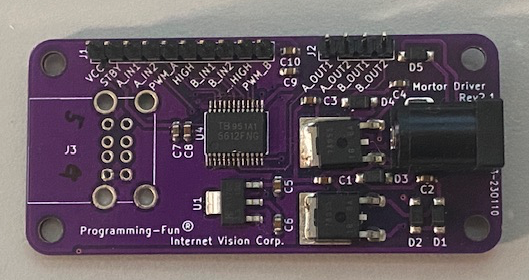
上の写真がモーター制御基板です。最終版の一つ前です。左には電源供給用のUSB端子をつけようと思ったのですが、痛恨のミスをしてしまいましたww
正しいのは下の図です。分かりますか?穴の位置を間違えていましたwwwww
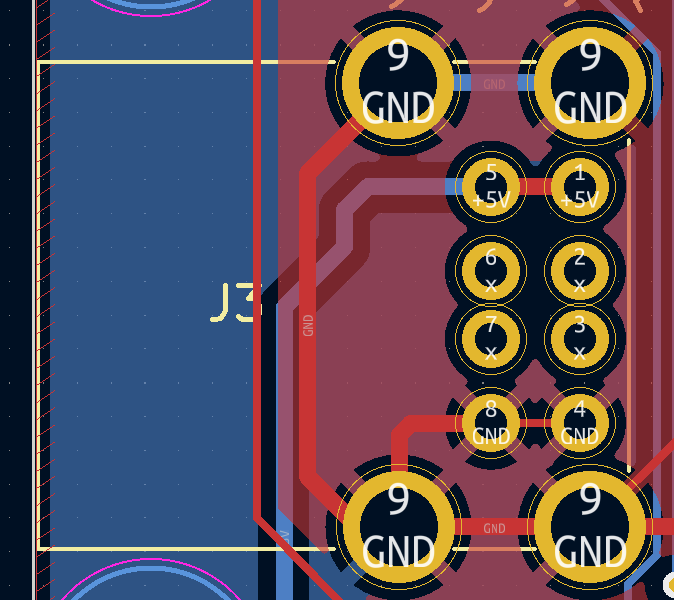
海外に製造を発注しているのですが、このミス1回でお金も時間も無駄になってしまいます。でもミスなしで一発で完成はなかなかできませんw
今回、このモーター制御基板は最終版として試作発注しているのですが、ちょっと心配なのは、ボードコンピュータとモータの駆動を賄い切れるかどうかです。電池の性能と、電源の性能の両面で耐えられるかについてテストをする必要がありそうです。
続く・・・w
↑
ここをポチりこお願いいたしますw